深入理解透视矩阵¶
图形学渲染是将虚拟的三维世界转换成二维像素图片,在这个转换过程中,坐标变换不可或缺,其中透视投影是实现近大远小等透视效果的数学原理。由于左右手系、深度范围等多种影响因素,导致透视投影本身就有多个变种矩阵。本文试图寻找一种矩阵推导流程,明确各种影响因素的影响范围和具体表现。(本文采用列矩阵,因而矩阵变换为左乘)
GAMES101 的推导方式¶
闫令琪老师在 GAMES101 课程中给出了一种通俗易懂的透视矩阵推导方式,这里罗列其思考过程:
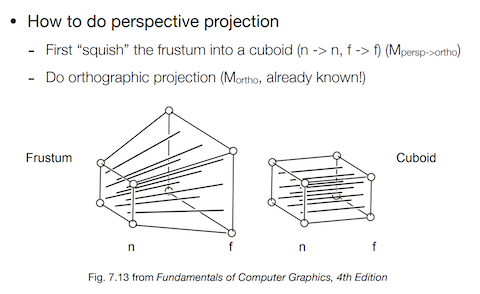
透视投影过程分为三步:
- 将平截头体挤压成一个长方体(压缩远平面,挤压过程为一个齐次矩阵 MatP2O)
- 对长方体做一个正交投影(正交投影则仅是一个普通的缩放平移矩阵,正交投影也是一个齐次矩阵 MatOrtho)
- 最后可算出透视矩阵:MatPersp = MatOrtho * MatP2O(列矩阵,先进行 P2O,后进行 Ortho)
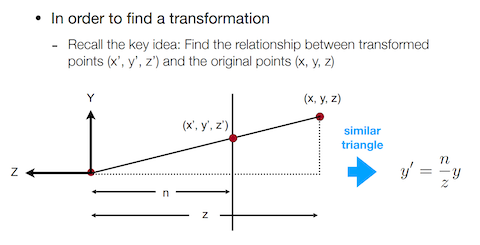
根据相似三角形原理,挤压远平面之后的 x 和 y 都与 z 值成比例关系,上图中的 n 和 z 均为带符号的坐标值,并非距离。

在齐次坐标中,只要齐次分量非 0,同一个 3D 坐标可以有无数个齐次坐标,闫老师这里选择了 z 作为齐次分量。
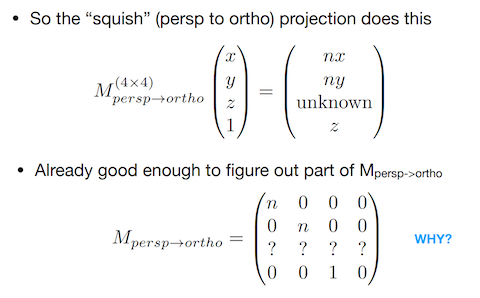
根据压缩前后的坐标关系,构造 MatP2O 矩阵,仅欠缺矩阵的第三行。
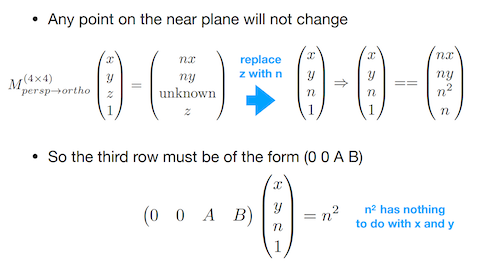
压缩过程我们希望近平面和远平面的 z 坐标保持不变,上图中的 n 也是带符号的坐标值,并非距离。
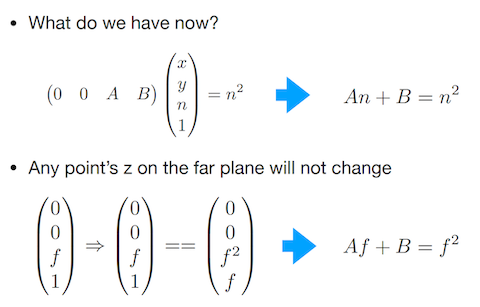
根据近远平面 z 坐标不变的条件我们可以得到二元一次方程组,其中 n 和 f 也是带符号的坐标值,不是距离。
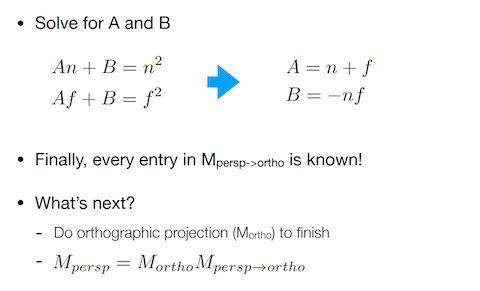
算出第三行,我们得到了挤压矩阵为:
其中,n 和 f 为带符号的坐标值。挤压矩阵不改变左右手性。
有了压缩矩阵,我们还需要一个正交投影矩阵。
普通的正交投影仅是缩放和平移,不改变左右手性。给定 l 和 r 为左右边界,b 和 t 为下上边界,n 和 f 为前后边界,投影后为: 也就是映射关系为:(这里 l、r、b、t、n、f 都是带符号的坐标值,非距离)
那么投影前后的坐标关系为:
对应投影矩阵为:
由于 n 映射为-1,f 映射为 1,那么当 n < f 时,该投影矩阵不改变左右手性,当 n > f 时,该矩阵会改变左右手性
以上,我们得到第一个透视投影矩阵:
其中,n 和 f 为带符号的坐标值,非距离。
既然纯手工推导出一个透视矩阵,我们当然要验证一下其正确性,就跟 OpenGL 数学库 glm 对比一下。
与 glm 透视矩阵对比¶
glm 中透视矩阵默认是右手坐标系,深度映射范围是 [-1, 1],需要四个参数:
对应透视矩阵的代码为:
glm::mat4 MatPerspTest1 = glm::perspective(glm::radians(45.0f), 1920.0f/1080.0f, 0.1f, 50.0f);
打印出其值:
同样的参数应用到 MatPersp1,则有:
带入数值,可得透视矩阵为:
对比 MatPerspTest1 和 MatPerspTest2,我们发现,抛开浮点精度的差异之外,两者相差一个负号,why?
接下来,让我们看看书本怎么说。
《3D 游戏与计算机图形学中的数学方法》中的推导¶
《Mathematics for 3D Game Programming and Computer Graphics Third Edition》一书中 5.5.1 章节,使用数学方法推导出标准透视矩阵,这里就不照搬推导过程,结论如下图:
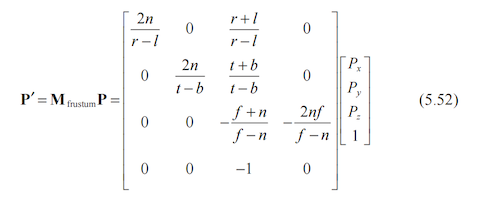
需要注意的是,书中基于右手坐标系,并且 Z 值映射到 [-1, 1],区别在于,书中推导过程使用了 -z 作为透视矩阵的齐次分量,并且,上图中,r、l、t、b 四个是带符号的坐标值,而 n 和 f 为距离。
为了避免混淆,这里将表示距离的 n 和 f 替换成 zNear 和 zFar,我们得到第二个透视矩阵:(我们的推导中,n 和 f 带符号,zNear 和 zFar 是距离)
如果将 n=-zNear,f=-zFar 带入我们推导的 MatPersp1,我们就会发现,MatPersp1 和 MatPersp2 仅存在两点不同:
- 第一二行的第三个值不同
- 整体相差一个负号
针对第一个问题,一般情况下 r=-l,t=-b,那么第一二行的第三个值都会是 0。针对第二个问题,相差一个负号的原因在于推导透视矩阵的过程我们使用了 z 作为齐次分量,而书中使用了 -z。
由此我们可以看出,只要将我们的透视矩阵乘以一个 -1,就能得到书本中的标准 OpenGL 右手系透视矩阵。另外,将我们的透视矩阵乘以任意非零 scale,得到的矩阵也具备透视矩阵功能,只不过齐次分量成了 z*scale,scale不为0。
通过查看 glm 源码,我们发现,其中的 perspectiveRH_NO 函数所实现的右手系透视矩阵就是 -MatPersp1。
书本中还推导了当 zFar 趋于无穷远时的透视矩阵,也就是在原有基础上求极限。
另一种矩阵形式¶
前面在计算 MatPerspTest2 矩阵给出了如下等式:
可以算出:
同样的:
我们得到第三个透视矩阵:
透视矩阵思考点¶
整理一下思路,我们推导透视矩阵的过程中,需要处理的问题在于:
- 左右手性?(正负半轴?)
- 齐次坐标的 w 分量?(齐次分量应该存放什么值?)
- 深度映射范围?(ReversedZ?)
其中,1 和 2 在于推导挤压矩阵的过程需要考虑,3 则在于推导后续正交矩阵需要考虑。
对于右手坐标系:
- 世界坐标使用右手系,相机看向 Z 负半轴,也就是 n=-zNear,f=-zFar
- 齐次分量存放 -z
- 针对 OpenGL,深度映射范围是 n=>-1,f=>1,由于 n > f,此映射导致变换了手性(右手系变左手系,不过由于投影和透视除法之后拆分为屏幕坐标和深度值,也就没那么在意手性)
对于左手坐标系:
- 世界坐标使用左手系,相机看向 Z 正半轴,也就是 n=zNear, f=zFar
- 齐次分量存放 z
- 针对 Direct3D,深度映射范围是 n=>0,f=>1,由于 n < f,此映射不改变手性
值得一提的另外一点是关于实践中 aspect 的取值。我们知道 aspect 是宽高比,那么具体一点是什么东西的宽高比?以下我们列出来可选的几种宽高度量方式:(参考 https://zhuanlan.zhihu.com/p/113662566)
- 屏幕坐标范围的宽高(通过 glfwGetWindowSize 获得,就是鼠标坐标的范围,此宽高与像素分辨率并没有绝对的映射关系,一般是 1:1)
- 渲染 FrameBuffer 的像素阵列宽高(通过 glfwGetFramebufferSize 获得)
- 显示器物理大小的宽高,单位毫米(通过 glfwGetMonitorPhysicalSize 获得)
透视矩阵参与的渲染过程中,得到的内容是先放到 FrameBuffer 的像素中,而后被显示在显示器屏幕上。我们的目标是人眼看到的物体宽高比刚好是数值上的宽高比,因此,应该用 FrameBuffer 像素数量的 widget 和 height 所对应的实际物理长度(mm)来计算宽高值。
FrameBuffer 只能计算像素数量的比值(FrameBufferPixelCountAspect,简称 FBPCAspect),单个像素是没有大小的(可以看成正方形)。但是在显示器上,单个像素是有大小的,也就是存在单个像素宽高比(MonitorPixelAspect,简称 MPAspect),那么,为了在显示器上看到宽高比正常的内容,传递给透视矩阵的宽高比应该是 aspect = FBPCAspect * MPAspect(没错,不同显示器要用不同的 aspect。如果两个显示器的 MPAspect 不同,那么,同一张的图片放到这两个显示器上看会出现宽高比不一致)
如果 MPAspect 不等于 1,按照 FrameBuffer 每个像素都是正方形的逻辑来看,存粹 FrameBuffer 中的渲染结果会被拉伸或压缩,但是,显示到屏幕上的时候,会由于屏幕像素存在同样的比例而显示效果正常。
最后,在做多个 pass 的渲染时,RenderTexture 的内容被重新采样和渲染,只要保证渲染后的像素宽高比跟原 FrameBuffer 的像素宽高比一致就好。
完整运算流程¶
基于前面对透视矩阵的推导和分析,现给出如下完整推导所有类型透视矩阵的流程:(这里仅考虑 l=-r,b=-t 的情况)
- 根据目标左右手性确定 n 和 f 的值(左手系为正数、右手系为负数)
- 将 n 和 f 的值代入 MatP2O 得到压缩矩阵
- 如果是右手系,handedness = -1;如果是左手系,handedness = 1(保证齐次分量永远是 z 的绝对值)
- 根据目标深度映射范围算出正交投影矩阵 MatOrtho(这一步可能会改变原有的左右手性)
- 透视矩阵为:MatPerspective = MatOrtho * handedness * MatP2O
UE 透视矩阵¶
应用上述完整运算流程,我们来推导一下 UnrealEngine 中的透视矩阵:
FORCEINLINE FPerspectiveMatrix::FPerspectiveMatrix(float HalfFOV, float Width, float Height, float MinZ, float MaxZ)
: FMatrix(
FPlane(1.0f / FMath::Tan(HalfFOV), 0.0f, 0.0f, 0.0f),
FPlane(0.0f, Width / FMath::Tan(HalfFOV) / Height, 0.0f, 0.0f),
FPlane(0.0f, 0.0f, ((MinZ == MaxZ) ? (1.0f - Z_PRECISION) : MaxZ / (MaxZ - MinZ)), 1.0f),
FPlane(0.0f, 0.0f, -MinZ * ((MinZ == MaxZ) ? (1.0f - Z_PRECISION) : MaxZ / (MaxZ - MinZ)), 0.0f)
)
{ }
上述代码来自 UnrealEngine 中的 PerspectiveMatrix.h 文件。
根据流程,有:
- UE 的世界坐标是左手系,透视矩阵采用左手系,n=zNear,f=zFar
- 压缩矩阵为:
- 左手坐标系,handedness = 1
- UE 使用的深度映射范围是 n=>0,f=>1(FReversedZPerspectiveMatrix 实现的版本则是反过来的),我们得到正交矩阵:
- 透视矩阵为:
- 我们换一种形式: 带入上式,则:
将 MatPerspective2 与 UE 的实现做对比,可以发现:
- 在 MinZ 不等于 MaxZ 的情况下完全一致
- UE 源码中的 HalfFOV 是 fovx/2
- 在 MinZ 等于 MaxZ 的情况其实就是 zFar 趋于正无穷的极限情况,有兴趣的读者可以自行求极限
总结¶
一般来说,透视矩阵具备如下形式:(列向量构成的矩阵)
我们可以简单判断其推导条件:
- e 为 1 则表示该矩阵在左手系下推导得到,看向 Z 正半轴;e 为-1 则为右手系,看向 Z 负半轴
- c 的分子为 zNear+zFar 表示深度映射范围是 [-1, 1]
- c 的分子为 zFar 表示深度映射范围是 [0, 1] 并且 zFar=>1
- c 的分子为 zNear 表示深度映射范围是 [0, 1] 并且 zNear=>1,也就是 ReversedZ
- c 是常数则表示该矩阵是 zFar 趋于正无穷的情况